Российские ученые вместе с зарубежными коллегами впервые продемонстрировали прямые доказательства существования скрытого хаотического аттрактора. Этот объект — своего рода спрятанная область притяжения — выводит системы из состояния равновесия, делая их поведение непредсказуемым. Результаты работы, поддержанной грантами Российского научного фонда и опубликованной на страницах журнала Nonlinear Dynamics, и развиваемая в ней теория скрытых колебаний позволят создать более эффективные и безопасные способы управления разнообразными инженерными механизмами, например турбинами ГЭС, и предсказывать природные и техногенные катастрофы.
Моделирование динамики и определение устойчивости — одна из наиболее актуальных математических задач в инженерии и не только. Она появилась еще в конце XVIII века, когда шотландский изобретатель Джеймс Уатт адаптировал центробежный регулятор для паровых машин. Тяжелые грузы этого устройства сильно отклонялись в стороны, если вал двигателя вращался слишком быстро, и перемещали специальный рычаг, закрывавший заслонку подачи пара. В результате механизм замедлялся, грузы под действием силы тяжести возвращались в исходное положение, а заслонка открывалась вновь. Гениальный в своей простоте подход оставался рабочим до середины XIX века, когда начали применять различные смазки и лучше обрабатывать металл, чтобы снизить трение, из-за которого регулятор нагревался. Однако именно трение гасило колебания и предотвращало самораскачивание, а теперь регуляторы перестали справляться и двигатели ломались. Математики связали эти колебания с неустойчивостью состояния равновесия, соответствующего установившемуся рабочему режиму регулятора. Также эти колебания оказались самовозбуждающимися, то есть нарастали даже из-за небольших внешних воздействий.
Вместе с тем подобные колебания можно в достаточно широком диапазоне назвать устойчивыми — чем дольше они происходят, тем с большей вероятностью оказываются в некотором диапазоне, то есть стремятся к определенному режиму — аттрактору. Такие автоколебания легко обнаружить в экспериментах и можно достаточно точно описать математически, а их поведение более-менее предсказуемо. Однако иногда состояние системы оказывается в поле действия скрытого хаотического аттрактора, не связанного с состояниями равновесия и не очень понятно откуда появившегося, что приводит к поведению, непредсказуемому настолько, что сложно предугадать последствия даже мельчайших воздействий извне. Эта математическая проблема приобретает совершенно новые масштабы, когда дело доходит до управления турбинами на ГЭС или АЭС, летательными аппаратами, прогнозирования опасных природных явлений и народных волнений.
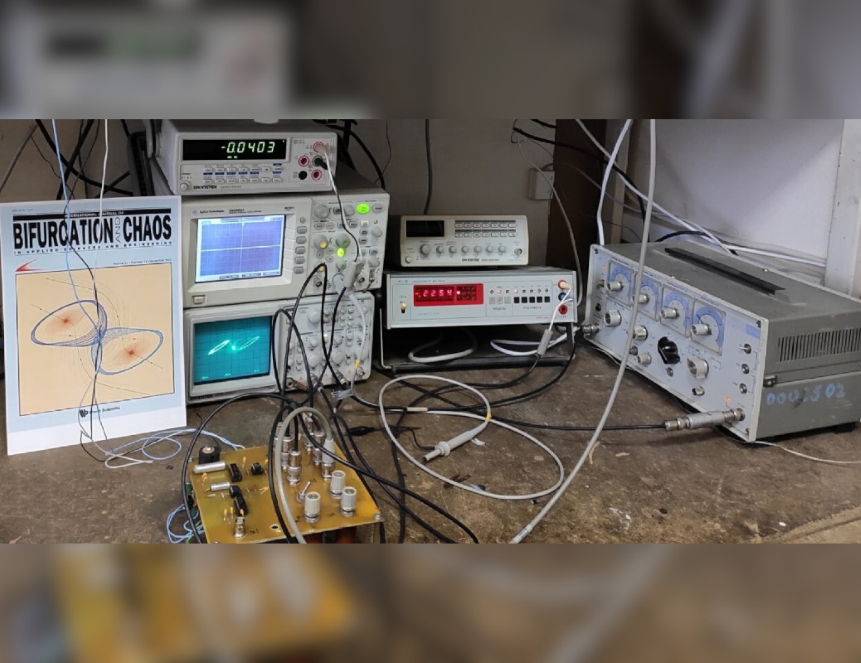
В начале 60-х годов прошлого века математики Эдвард Лоренц и Ёсисукэ Уэда впервые обнаружили хаотический аттрактор при численном моделировании реального физического процесса. Позднее американский инженер Леон Чуа продемонстрировал (уже в эксперименте) свидетельства хаотического поведения в простейшей электрической цепи на экране осциллографа. До недавнего времени считалось, что все аттракторы в такой цепи — самовозбуждающиеся, однако в 2009 году автор новой работы Николай Кузнецов теоретически обосновал существование в ней и скрытых хаотических аттракторов, а также предложил новое разделение аттракторов на скрытые и самовозбуждающиеся. Вместе с тем появлявшиеся позднее экспериментальные свидетельства оказались косвенными.
В данной работе сотрудники Санкт-Петербургского государственного университета (Санкт-Петербург), Института проблем машиностроения РАН (Санкт-Петербург), регионального отделения Института радиотехники и электроники имени В. А. Котельникова РАН (Саратов), Саратовского государственного технического университета имени Ю. А. Гагарина (Саратов) вместе с иностранными коллегами, среди которых — профессор кафедры электротехники и компьютерных наук Калифорнийского университета в Беркли Леон Чуа, разработали экспериментальную методику, с помощью которой поставили точку в вопросе существования скрытых аттракторов в реальном радиофизическом эксперименте. Для этого была создана специальная электронная схема, дополняющая схему Чуа и позволяющая регулировать начальные условия ее работы. Ранее скрытые хаотические аттракторы нельзя было обнаружить именно потому, что систему запускали естественным образом из области равновесия, теперь же авторы несколько сместили ее. Подавая на вход электрической цепи сигналы специального вида, ученые смогли наблюдать на экране осциллографа притяжение состояния цепи к скрытому аттрактору. При этом без дополнительного воздействия система оставалась в окрестности состояния равновесия.
«Эта работа продолжает развитие теории скрытых колебаний, которая открыла ряд принципиально новых возможностей определения границ устойчивости и выявления нежелательных колебаний для предотвращения техногенных катастроф. В дальнейшем мы планируем развивать методы теории скрытых колебаний и применить их при управлении современными навигационными системами, системами энергообеспечения электровозов и перспективных гибридных самолетов с электродвигателем», — рассказывает руководитель проекта, поддержанного грантом РНФ, Николай Кузнецов, доктор физико-математических наук, член-корреспондент РАН, руководитель ведущей школы Российской Федерации в области математики и механики, заведующий кафедрой прикладной кибернетики СПбГУ, заведующий лабораторией информационно-управляющих систем ИПМаш РАН.
Подписывайтесь на InScience.News в социальных сетях: ВКонтакте, Telegram, Одноклассники.