Ученые Университета ИТМО разработали новый метод проектирования гибких, безопасных и энергоэффективных роботов. Возможности метода продемонстрировали на собранном прототипе — компактном прыгающем роботе, сообщается в поступившем в редакцию InScience.News пресс-релизе.
«Классические» роботы способны эффективно работать только в определенной статичной среде с объектами, заранее учтенными на этапе программирования. На данный момент ученые разрабатывают методы проектирования сервисных роботов, которые могут безопасно и эффективно взаимодействовать с незнакомым окружением. Под окружением понимаются люди, предметы, поверхности земли. В дальнейшем подобные устройства могут стать помощниками в инспекции и обслуживании инфраструктуры, доставке грузов или уходе за пожилыми людьми. Благодаря новому методу роботы смогут решать сложные задачи в неизвестном окружении без использования сложных алгоритмов управления.
Ученые применили метод морфологического проектирования. С его помощью можно создавать устройства, которые генерируют силу и моменты движения благодаря грамотному распределению веса и использованию соединений из эластичных материалов вместо громоздких традиционных соединений с подшипниками и осями. При этом в таких механизмах работа двигателя обеспечивает лишь корректировку поведения — это позволяет экономить энергию.
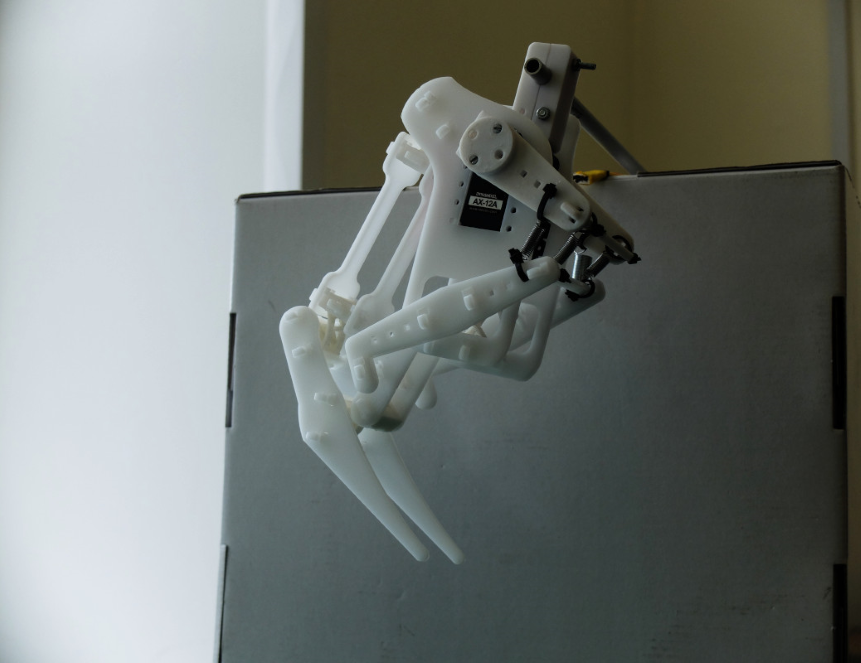
«Благодаря минимизации управляющих воздействий и использованию эластичных деталей создаваемые роботы становятся безопасными для людей и окружающей среды, требуют меньше электроэнергии на движения, а также не разрушаются при динамической нагрузке. Для демонстрации возможностей метода мы спроектировали и собрали прототип компактного прыгающего робота, который подтвердил наши гипотезы», — заключает студент магистратуры по направлению «Робототехника» Кирилл Насонов.
Цель ученых — разработка галопирующего робота с гибкой спиной. В сентябре 2021 года исследователи представят свой результат на конференции по робототехнике 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021).
Подписывайтесь на InScience.News в социальных сетях: ВКонтакте, Telegram, Одноклассники.





