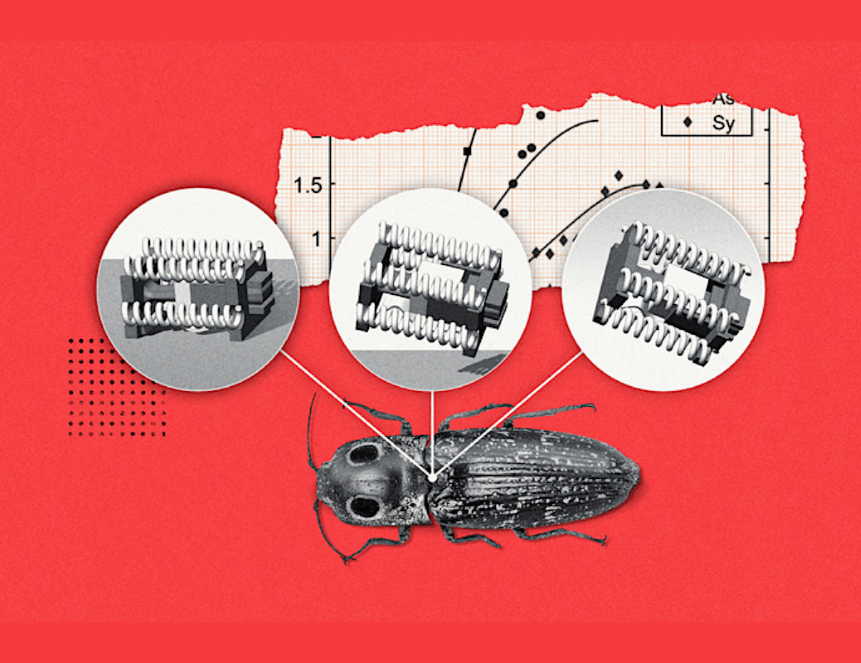
Американские инженеры разработали маленького робота, вдохновленного жуком-щелкуном. Как и насекомое, робот напрягает «мышцу» в своей «грудной клетке», а когда она резко расслабляется — очень далеко прыгает. В перспективе разработку можно использовать в сельском хозяйстве или при починке больших механизмов. Исследование опубликовано в журнале Proceedings of the National Academy of Sciences.
«Одной из главных задач мелкомасштабной робототехники является поиск конструкции, которая была бы небольшой, но достаточно мощной, чтобы преодолевать препятствия или быстро избегать опасных мест», — рассказал Самех Тауфик из Иллинойского университета в Урбане-Шампейне.
Новая разработка его команды как раз направлена на решение этой задачи. Авторы работы долгое время исследовали анатомию, механику и эволюцию жуков-щелкунов. В 2020 году они обнаружили, что эти насекомые могут очень далеко прыгать, когда резко расслабляют свернутую в кольцо мышцу в своей грудной клетке.
Вдохновившись этим механизмом, ученые решили создать работающего схожим образом робота. Инженеры использовали крошечные спиралевидные приводы, аналогичные мышцам. Они заставляют тело робота медленно сгибаться и накапливать энергию. Затем энергия резко высвобождается и толкает робота вверх. Ученые говорят, что их механизм гораздо примитивнее природного, но за счет этого проще изготавливать нужные мелкие детали.
Всего инженеры разработали четыре варианта роботов с таким механизмом, остановившись в итоге на двух самых эффективных. Ученые планируют продолжить разработки в этой области. «У нас нет определенного подхода к точному дизайну следующего поколения этих роботов, но исследование положит начало эволюции данной технологии — процессу, похожему на биологическую эволюцию», — прокомментировал Самех Тауфик.
Ученые предполагают, что подобные роботы смогут проникать в труднодоступные места и помогать проводить техническое обслуживание больших механизмов, например турбин и реактивных двигателей. Также они могут пригодиться в сельском хозяйстве.
Подписывайтесь на InScience.News в социальных сетях: ВКонтакте, Telegram, Одноклассники.