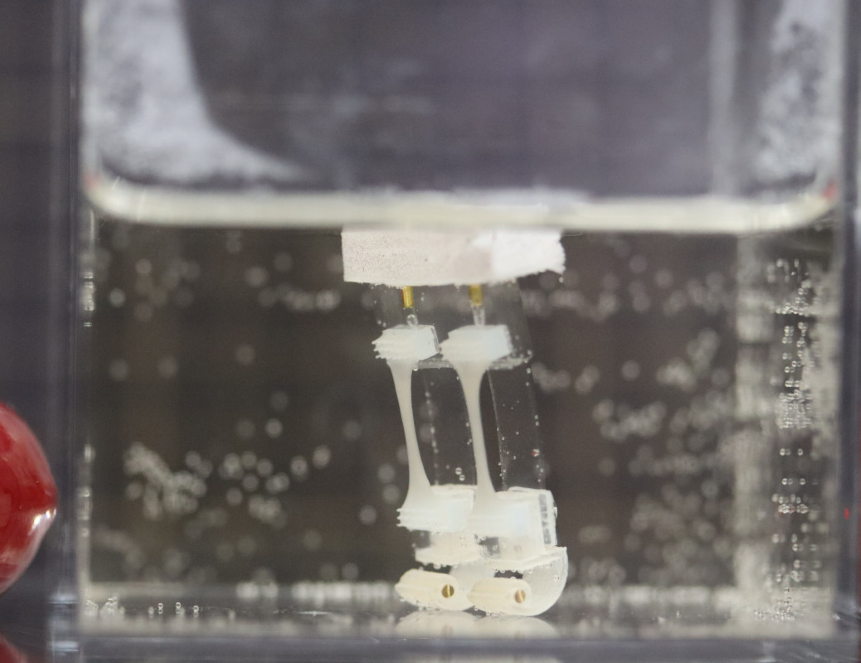
Японские исследователи создали двуногого робота из силиконовой резины, к телу и ногам которого прикреплены искусственно выращенные мышечные ткани. С помощью электрической стимуляции мышц робот может ходить, стоять и поворачиваться. В будущем ученые оснастят устройство суставами и системой подачи питательных веществ для живых тканей. Исследование опубликовано в журнале Matter.
В последнее время ученых все больше привлекает разработка биогибридных роботов на стыке биологии и механики. Верхняя часть нового двуногого робота, созданного японскими исследователями, состоит из пенопластового буя, а нижняя — из утяжеленных ног, помогающих ему стоять на земле. «Скелет» сделан из силиконовой резины, которая позволяет телу сгибаться благодаря сокращению полосок мышечной ткани, выращенных в лаборатории. Их ученые прикрепили к телу и ногам робота.
Также исследователи настроили движение машины. Когда они стимулировали мышечную ткань электрическим током, та сокращалась и поднимала ногу вверх. Затем электричество рассеивалось, и нога опускалась вперед. Ученые чередовали электрическую стимуляцию левой и правой ноги каждые 5 секунд, и миниатюрный биогибридный робот успешно ходил со скоростью 5,4 миллиметра в минуту (0,0032 километра в час). Для поворота исследователи нажимали на правую ногу каждые 5 секунд, а левая служила опорой. Робот совершил поворот налево на 90 градусов за 62 секунды. Так управляемый мышцами робот смог шагать, останавливаться и поворачиваться.
Чтобы приложить электрическое поле к каждой ноге, ученые перемещают электроды вручную. Однако в будущем они планируют интегрировать электроды в робота и увеличить скорость его движения. Также команда оснастит робота суставами и более толстыми мышечными тканями. Но сперва исследователям придется внедрить систему подачи питательных веществ — живые ткани устройства должны постоянно поддерживаться.
Подписывайтесь на InScience.News в социальных сетях: ВКонтакте, Telegram, Одноклассники.