Американские ученые разработали новый тип гибких роботизированных захватов, способных поднимать и удерживать такие хрупкие или тонкие объекты, как яичный желток и волос. Новая предложенная учеными технология основана на принципе киригами — сборке трехмерных объектов из плоских листов материала. Статья опубликована в журнале Nature Communications.
Новые роботизированные захваты, изготовленные учеными из Университета штата Северная Каролина, основаны на принципе киригами — японском искусстве создания трехмерных фигур из плоских листов бумаги. Используя этот принцип, авторы разработали новую технологию, которая преобразует листы материалы в трехмерные структуры.
«Если пользователь знает, какая форма 3D-структуры ему нужна, он может использовать наш подход для определения формы границ и шаблона прорезей, которые должны быть у 2D-материала. Дополнительный контроль над конечной структурой становится возможным благодаря управлению направлением обработки материала», — комментирует первый автор работы Яое Хун.
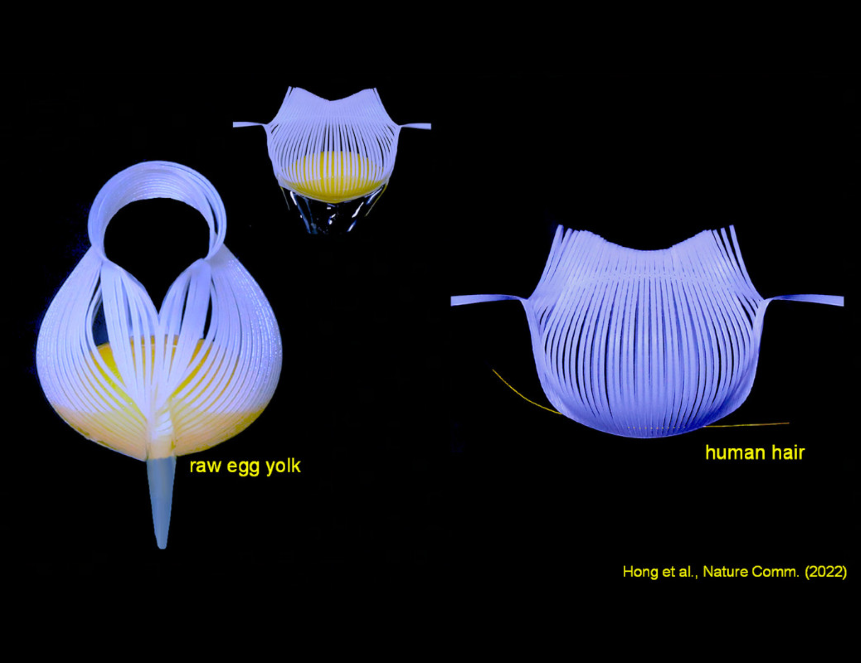
Метод позволит создавать широкий спектр структур из 2D-материалов. Исследователи продемонстрировали его эффективность, разработав роботизированные захваты. Они способны поднимать такие хрупкие и маленькие объекты, как яичный желток или человеческий волос. Как правило, роботы-манипуляторы прочно захватывают предмет, оказывая на него сильное давление. Однако новая технология позволяет захватам сначала окружать объект, а потом поднимать подобно тому, как человек берет предметы в ладони.
Новая технология может найти применение в биомедицине. Например, она позволит создавать протезы, соответствующие форме сустава. Сейчас ученые ищут способ превратить свою разработку в рабочую технологию, которую можно будет применять в промышленности.
Подписывайтесь на InScience.News в социальных сетях: ВКонтакте, Telegram, Одноклассники.





