Британские ученые разработали глубоководного робота, который перемещается в воде как медуза. Он оказался намного эффективнее традиционных глубоководных аппаратов с пропеллерами. Исследование опубликована в журнале Science Robotics.
«Интерес к таким организмам, как кальмары, медузы и осьминоги объясняется их уникальностью. У них нет скелета, но они все равно выдающиеся пловцы», — отмечает один из исследователей, Франческо Джорджо-Серки из Эдинбургского университета. По затратам на перемещение медузы являются наиболее эффективными существами в природе, превосходя как бегающих и летающих животных, так и рыб со скелетом.
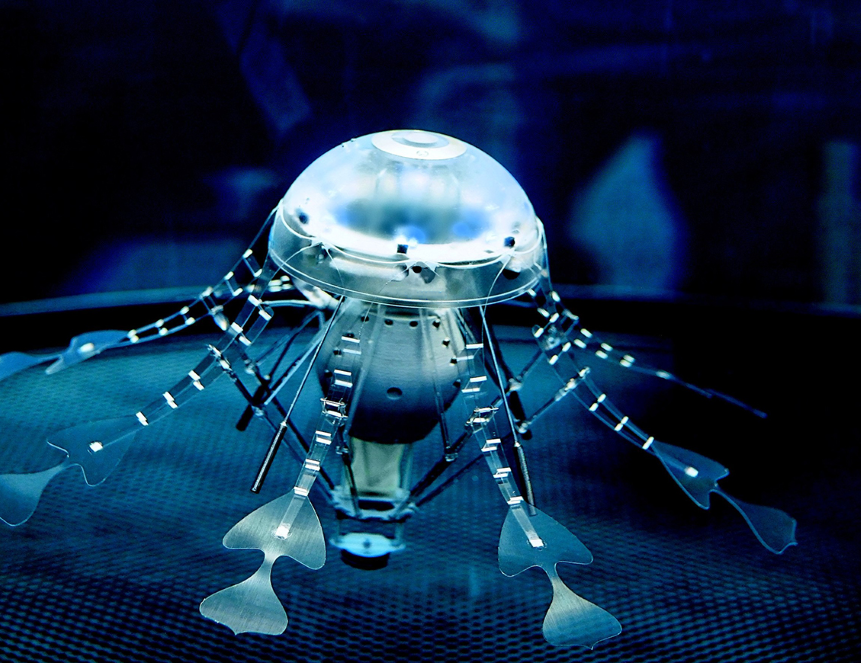
Опираясь на строение такого эффективного пловца, как ущастая медуза (Aurelia aurita), ученые из Саутгемптонского и Эдинбургского университетов разработали подводного робота. Это первый подводный аппарат, который демонстрирует преимущества использования для подводного движения резонанса, то есть сильных вибраций, возникающих при приложении силы с определенной частотой, например, при толкании ребенка на качелях. Использование резонанса позволяет роботу обладать очень слабой мощностью, но при этом он все равно способен генерировать мощные водяные струи, которые проталкивают его вперед.
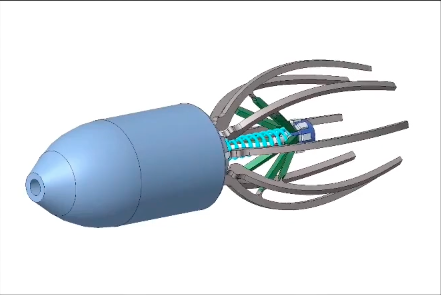
Механизм состоит из резиновой мембраны, которая охватывает восемь гибких ребер, образующих «движущий колокол». Ребра напечатаны на 3D-принтере. Маленький поршень в верхней половине робота бьет по колоколу. Тот расширяется и затем возвращается в исходное состояние. Так робот создает водяные струи, которые позволяют ему двигаться. Иначе говоря, он имитирует технику плавания медузы. Когда поршень работает с правильной частотой, робот может перемещаться на одну длину своего тела в секунду. С такой же эффективностью движется Aurella aurita, один из самых эффективных пловцов в мире.
Испытания показали, что разработанный робот в 10-50 раз эффективнее типичных подводных аппаратов с пропеллерами. Такие результаты в сочетании с преимуществами мягкого и гибкого тела делают его идеальным для работы в сложных условиях, таких как коралловые рифы, археологические раскопки или воды с большим количеством водных обитателей.
«Предыдущие попытки привести в движение подводных роботов с помощью струйных систем сводились к проталкиванию воды через жесткую трубку. Но мы хотели пойти дальше. Поэтому мы добавили эластичность и резонанс, чтобы сымитировать созданный природой механизм. Я был по-настоящему удивлен результатами. Я был уверен, что наша конструкция будет работать, но ее эффективность оказалась намного выше ожидаемой», — поведал один из авторов, Тьерри Бужар из Саутгемптонского университета.
«В последнее время наблюдается всплеск исследований в разработке роботов, основанных на биотехнологий. Например, Big Dog от Boston Dynamic. Такие роботы могут быть намного более эффективными и универсальными, чем стандартные промышленные. Наше исследование подтверждает, что это утверждение применимо и к подводной робототехнике. Конечно, есть еще много проблем, но и много возможностей в этой сфере. Сейчас мы стремимся доработать нашего робота и превратить его в полностью автономный маневренный подводный аппарат, способный определять окружающую среду и перемещаться в ней», — рассказал руководитель проекта Габриэль Веймаут.
Подписывайтесь на InScience.News в социальных сетях: ВКонтакте, Telegram, Одноклассники.